Belt Technologies는 ISP(독립적으로 조종 가능한 풀리)라 불리는 평면 벨트 트래킹에 혁신적인 개념을 개발했으며, 다음과 같은 시스템 설계에 사용할 수 있습니다:
- ISP가 아이들러 또는 종동 풀리인 2개의 풀리 컨베이어 시스템
- 공통 축에 여러 개의 아이들러 풀리가 있는 시스템
- 구불구불하거나 다른 복잡한 벨트 경로가 있는 시스템
ISP가 있는 평면 벨트를 조종하는 것은 벨트에 비례하여 풀리의 각도를 조정함으로써 벨트의 너비에 따른 장력 관계를 변경하는 개념에 근거를 두고 있습니다.
필로우 블록 조정으로 풀리 샤프트를 좌/우 또는 상/하로 움직이는 대신 ISP는 가변 스티어링 칼라와 밀봉 베어링 어셈블리를 풀리의 본체에 장착합니다.
ISP 부품:
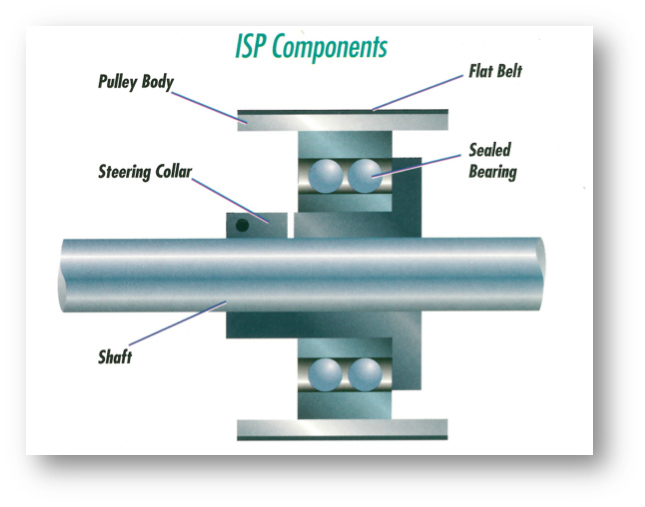
스티어링 칼라는 비대칭 또는 오프셋 보어로 설계되었습니다. 회전하면 칼라가 풀리 몸체의 각도를 변경하여 풀리 면을 가로지르는 벨트의 양방향 움직임을 제어합니다.
ISP는 Belt Technologies에서 독점적으로 제공됩니다. 평면 금속 벨트를 조종하는 간단한 방법을 제공합니다. 사용자는 ISP 스티어링과 크라우닝, 플랜징 및 타이밍 요소의 기존 벨트 추적 설계를 결합할 수 있으며, 시너지 효과가 있는 벨트 추적 시스템을 만들어 벨트를 특정 추적 매개 변수로 효율적이고 정확하게 조종할 수 있습니다.
ISP의 고유한 특성 및 장점
- 스티어링 칼라를 회전시켜 평면 벨트를 신속하게 추적합니다.
- ISP 설계는 생산 기계의 벨트를 교체할 때 가동 중지 시간을 최소화합니다.
- ISP 시스템은 사용하기 쉽고 특별한 도구나 교육이 필요하지 않습니다.
- ISP는 평면 벨트를 사용하여 컨베이어 시스템의 설계 및 조립을 단순화합니다.
- 일반적으로 주요 시스템 수정 없이 기존의 아이들러 풀리를 ISP에 새로 장착할 수 있습니다.
- 벨트 추적 매개 변수가 설정되면 유지 보수가 필요 없습니다.
- 플랜지 및 타이밍 풀리를 사용하면 측면 하중을 최소화하여 벨트 수명을 연장합니다.
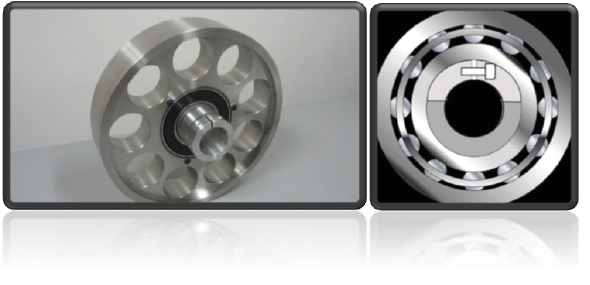
ISP 풀리(사진 및 횡단면 보기)
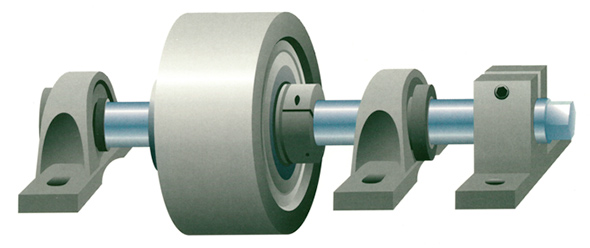
설치 및 사용
ISP는 시중에서 판매하는 필로우 블록을 사용하여 시스템 프레임에 장착됩니다. 클램프는 샤프트가 회전하는 것을 방지하기 위해 사용됩니다.
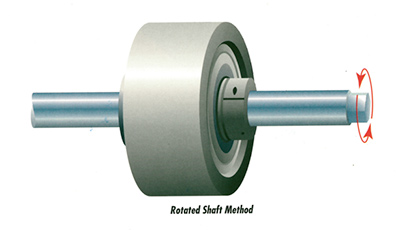
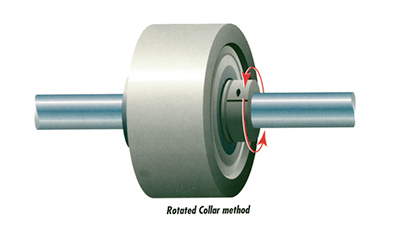
ISP 평면 벨트 추적의 회전형 샤프트 방식
- 샤프트에 단일 풀리가 있는 시스템과 함께 사용됩니다.
- 풀리 몸체가 캡이 있는 튜브 디자인 일 때 항상 사용됩니다.
- 여러 개의 풀리가 공통 샤프트에 있을 때에는 절대 사용되지 않습니다.
- ISP가 여러 개 풀리 시스템의 스티어링 롤인 경우 선택적으로 사용됩니다.
ISP에 내장된 스플릿 칼라와 잠금 나사를 사용하여 ISP를 샤프트에 고정시키십시오. 샤프트와 칼라를 하나의 장치로 회전시킵니다. 원하는 추적 특성이 얻어지면 샤프트 클램프를 고정하여 샤프트가 회전하지 않도록 하십시오. 풀리 몸체는 이제 ISP 어셈블리에 내장된 베어링을 중심으로 회전합니다. 이 방법은 장력 상태에서 작동하면서 벨트를 추적할 수 있습니다.
ISP 평면 벨트 추적의 회전형 칼라 방식
- 공통 축에 여러 개의 풀리가 있는 경우 각 벨트/풀리 결합을 개별적으로 조정하는 데 사용됩니다.
- 시스템이 나선형 및 다른 복잡한 벨트 경로 시스템의 전형적인 외팔보 샤프트를 가질 때 사용됩니다. 이러한 조정은 벨트가 정지 상태 일 때만 수행하는 것이 좋습니다.
샤프트 클램프를 통해 샤프트를 고정하고 스티어링 칼라의 잠금 나사를 풀고 샤프트를 중심으로 스티어링 칼라를 회전시킵니다. 원하는 벨트 추적 특성이 얻어지면 잠금 나사를 고정하십시오.
어떤 디자인이 귀사에 적합합니까?
이 신제품에는 다양한 용도가 있으며 Belt Technologies에서는 귀사의 요구에 맞게 독립적으로 조종할 수 있는 풀리를 설계하고 제작합니다. 궁금한 내용에 대해 상담하시거나 설계 지원이 필요하시면 Belt Technologies에 문의하십시오.
Belt Technologies는 특수 용도의 풀리, 금속 벨트 및 드라이브 테이프의 설계 및 제작 분야에서 세계적인 선두주자입니다. 당사의 제품은 정밀 포지셔닝, 타이밍, 이송 및 자동화 제조업 분야에 사용되는 기계에 대해 특별한 이점을 제공합니다.
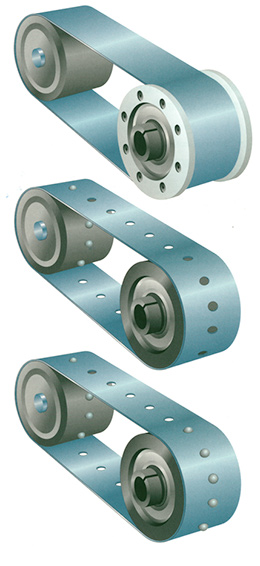
시스템 설정
첫 번째 – 드라이브 풀리는 마찰 드라이브 풀리입니다.
- ISP는 마찰 종동 풀리입니다. 이 구성은 0.030″(0.762 mm) 이상의 추적 정밀도에 대해 지정됩니다.
- 테프론® 플랜지는 풀리 본체에 부착되어 측면 제한을 설정합니다. ISP의 스티어링 기능은 벨트에 최소한의 측면 하중을 가하여 플랜지에 대해 벨트의 한쪽 가장자리를 설정하는 데 사용됩니다.
시스템 설정
두 번째 – 드라이브 풀리는 타이밍 풀리입니다.
- ISP는 마찰 종동 풀리입니다. 구동 풀리의 톱니와 벨트의 구멍은 측면 제한을 설정합니다. ISP의 스티어링 기능은 벨트 구멍의 측면 하중을 최소화하는 데 사용됩니다. 금속 벨트 시스템의 경우 추적 정밀도는 0.008″(0.203 mm)에서 0.015″(0.381 mm) 사이입니다.
또는
- ISP는 타이밍 풀리입니다. ISP의 톱니와 벨트의 천공은 벨트 구멍의 측면 하중을 최소화하기 위해 사용되는 ISP의 스티어링 기능으로 벨트의 정밀한 추적 제어에 사용됩니다. 다시 말하지만, 추적 정확도는 금속 벨트의 경우 0.008″(0.203 mm)에서 0.015″(0.381 mm)입니다.
참고: 구동 및 종동 풀리 모두에 타이밍 요소가 있는 것은 일반적으로 권장되지 않지만, 이 디자인은 풀리 사이의 중심 거리가 긴 금속 벨트 시스템 및 풀리 표면상의 미립자 축적이 벨트의 트래킹 특성을 계속해서 변화시키는 용도에서 선택적으로 사용될 수 있습니다.

Belt Technologies – 독립적으로 조종 가능한 풀리
Belt Technologies의 독립적으로 조종 가능한 풀리를 PDF 형식으로 다운로드할 수 있습니다. (
Adobe Acrobat Reader가 필요하며 초고속 인터넷 연결을 권장합니다.)
